03 de Enero del 2017
Clase 16
VALORES MÁXIMOS Y MÍNIMOS ABSOLUTOS
Toda función que sea diferenciable en una región acotada y cerrada alcanza su valor máximo (o mínimo), ya sea en un punto estacionario o en un punto de la frontera de la región.

Análisis Geométrico: Los máximos y mínimos de una función de dos variables miden altitudes máximas y mínimas sobre la superficie que constituye la gráfica de la función (son como las cotas del punto más elevado de una colina ó del punto más profundo de una hondonada).
Cálculo de máximos y mínimos absolutos de una función
Si z=f(x,y) es una función continua en una región D cerrada y acotada, ya hemos dicho que f alcanza sus valores máximo y mínimo absolutos. Según lo que acabamos de ver, estos valores se alcanzarán en:
- Puntos frontera de D
- Puntos críticos de f (puntos interiores de D en los que fx=fy=0, o alguna de ellas no exista).
Calculando f en todos ellos y eligiendo los valores mayor y menor tendremos los valores máximo y mínimo absoluto respectivamente.
06 de Enero del 2017
Clase 17
Máximos y mínimos condicionados
Se denomina extremo condicionado de una función f(x, y) al máximo o mínimo de una función f(x, y) alcanzado con la condición de que las variables independientes estén relacionadas entre sí. Para resolver mínimos y máximos condicionados se utiliza los denominados multiplicadores de Lagrange y se plantea un sistema de ecuaciones.
Método de los Multiplicadores de Lagrange
Sea g una función de dos variables continuamente diferenciable en un subconjunto del dominio de f. Si (xo , yo ) hace máxima (ó mínima) a f(x,y), sujeta a la condición extra g(x,y) = 0, entonces:
Son colineales, es decir, de igual dirección. En consecuencia existe un escalar λ tal que:
Para maximizar ó minimizar una función f(x,y) sujeta a la restricción g(x,y) = 0, se construye una función auxiliar H(x,y,λ)=f(x,y) - λg(x , y).Luego se hallan lo valores de x,y,λ , para los cuales son nulas las derivadas parciales de H: Hx=0 ,Hy=0 , H λ=0.Estos requisitos son equivalentes a los formulados anteriormente.
10 de Enero del 2017
Clase 18
Integrales Múltiples

Una integral múltiple es un tipo de integral definida aplicada a funciones de más de una variable real, por ejemplo, ó .


INTEGRAL DOBLE:
La doble integral como el volumen bajo una superficie. La región rectangular abajo de la figura es el dominio de integración, mientras que la superficie es la gráfica de la función de dos variables de la integral.

INTEGRAL TRIPLE:
Al realizar una "integral triple" de una función definida en una región del espacio xyz, el resultado es un hipervolumen, sin embargo es bueno notar que si el resultado se puede interpretar como el volumen de la región de integración. Para integrales de órdenes superiores, el resultado geométrico corresponde a hipervolúmenes de dimensiones cada vez superiores.


13 de Enero del 2017
Clase 19
TIPOS DE REGIONES DE INTEGRACIÓN:




REGIONES MAS GENERALES:


TRANSFORMACIONES DE INTEGRALES MULTIPLES:
Transformaciones
En el cálculo de una dimensión, es frecuente que usemos un cambio de variables (o una sustitución) para simplificar una integral. Al cambiar los papeles de x y u, podemos escribir la regla de la sustitución como:
donde x= ) y a=
y a= ) , b=
, b= ) .
.
Otra forma de escribir la ecuación anterior es como sigue:
Un cambio de variables también puede ser útil en integrales dobles. Ya hemos visto esto en las transformación a coordenadas polares. Las nuevas variables r y  están relacionadas con las viejas variables x y ypor las ecuaciones
están relacionadas con las viejas variables x y ypor las ecuaciones) y
y)
El cambo de variables entonces para una integral doble en coordenadas polares quedaría de la siguiente forma
donde "S" es la región el el plano polar que representa a la superficie "R" en el plano cartesiano.
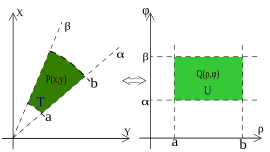
De una forma más general podemos decir que un cambio de variables es realizado debido a una transformación T del plano (u,v) al plano (x,y)
-
- T(u,v)=(x,y) donde x y y están relacionadas con u y v mediante las ecuaciones
-
- x=g(u,v) y=h(u,v)
Una transformación T no es más que una función cuyo dominio es un subconjunto de  . Si
. Si %3D(x_1,y_1)) entonces el punto
entonces el punto ) es la imagen de el punto
es la imagen de el punto ) . Si dos puntos no poseen la misma imagen entonces T es llamada una función uno a uno. La siguiente imagen ilustra una transformación de la región S en el plano uv. T transforma la región S en la región R en el plano xy llamada la imagen de S, que consiste de las imágenes de todos los puntos en S.
. Si dos puntos no poseen la misma imagen entonces T es llamada una función uno a uno. La siguiente imagen ilustra una transformación de la región S en el plano uv. T transforma la región S en la región R en el plano xy llamada la imagen de S, que consiste de las imágenes de todos los puntos en S.

Si T es una transformada uno a uno, entonces tiene transformada inversa  del plano xy al plano uv, pudiendo despejar de las ecuaciones anteriores para u y v
del plano xy al plano uv, pudiendo despejar de las ecuaciones anteriores para u y v
-
- u=G(x,y) v=H(x,y)
Cambios de variable en integrales multiples
Ahora veremos como se ve afectada un integral doble con un cambio de variable. Empezaremos con un pequeño rectángulo S en el plano uv cuya esquina inferior izquierda es el punto (u0,v0) y que tiene dimensiones Δu y Δv.

La imagen de nuestra región S es la región R en el plano xy, que tiene en uno de sus vértices con coordenadas (x0,y0)=T(u0,v0).

El vector
es el vector posición de la imagen del punto (u,v). La ecuación correspondiente al lado inferior de la superficie S es v=v0, cuya imagen esta dada por la función vectorial r(u,v0). El vector tangente a (x0,y0) en la imagen de nuestra región viene dado por

Podemos aproximar la imagen de la región R=T(s) por medio del paralelogramo formado por los vectores secante, como se puede apreciar el la figura anterior
y
Sabemos lo siguiente
por lo que podemos concluir que-r(u_0,v_0)+%5Capprox++%5CDelta+u+%5Ccdot+r_u)
de igual manera podemos decir que -r(u_0,v_0)+%5Capprox++%5CDelta+v+%5Ccdot+r_v)
Esto significa que podemos aproximar R a través del paralelogramo formado por los vectores  y
y  . Por lo tanto podemos aproximar el área de la región R como el área de este nuevo paralelogramo.
. Por lo tanto podemos aproximar el área de la región R como el área de este nuevo paralelogramo.

Utilizando conocimientos anteriores podemos aproximar el área utilizando la siguiente ecuación
Computando el producto cruz de la ecuación obtenida tenemos lo siguiente
La determinante que aparece en este cálculo es llamada el Jacobiano de la transformación y se le da una notación especial
Jacobiano:
El Jacobiano de una transformación T, que está dada por x(u,v) y y(u,v), es
Utilizando esta definición podemos aproximar el área de 'R'
donde el Jacobiano es evaluado en (u0,v0)
Ahora dividiremos una region de S en el plano uv en rectángulos Sijy sus imágenes en el plano xy las llamaremos Rij

Aplicando la aproximación cada uno de los 'Rij, aproximamos el integral doble de f sobre R de la siguiente manera
donde el Jacobiano es evaluado en (ui,vj). Notamos que la doble suma es una suma de Riemann para formar el integral
Suponga que T es una transofrmación C1cuyo Jacobiano no es igual a cero y que mapea una región S en el plano uv a una región R en el plano xy. Suponga que f es continua sobre R y que R y S son regiones planas de tipo 1 o 2. Suponga que T es biyectiva, excepto quizás en los bordes de S. Entonces,
Este teorema nos indica que podemos cambiar un integral de "x y y a "u y v" expresando a x y y en términos de v y sustituyendo %7D%7B%5Cpartial+(u,v)%7D+%5Cright+%7C+du+dv)
Como caso especial a este teorema se presentó anteriormente la transformación de coordenadas rectangulares a coordenadas polares. La transformación T que va del plano rθ al plano xy está dada por%3Dr+cos%5Ctheta) y
y %3Dr+sin%5Ctheta) . Esta transformación se puede apreciar mejor en la siguiente gráfica, donde vemos que como se mapea un rectángulo que esta en el plano rθ en el plano xy y viceversa.
. Esta transformación se puede apreciar mejor en la siguiente gráfica, donde vemos que como se mapea un rectángulo que esta en el plano rθ en el plano xy y viceversa.
Aplicando el conocimiento previo encontramos el Jacobiano de T que está dado por
Entonces podemos deducirlo siguiente
17 de Enero del 2017
Clase 20
20 de Enero del 2017

Coordenadas Polares
En un espacio R2, un dominio de integración que tenga una simetría circular es muchas veces susceptible de ser transformado de coordenadas rectangulares a polares, lo que significa que cada punto P (x, y) del dominio de una integral doble tomará su valor correspondiente en coordenadas polares mediante la siguiente transformación:

.svg)
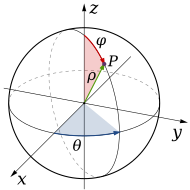
Coordenadas Esféricas
Cuando existe simetría esférica en un dominio en R3, es posible utilizar una transformación hacia coordenadas esféricas para simplificar una integral triple. La función es transformada por la relación

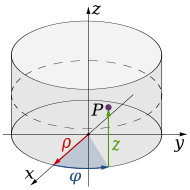
Coordenadas Cilíndricas

El uso de coordenadas cilíndricas para transformar una integral triple, es conveniente especialmente cuando el dominio de integración presenta simetría alrededor del eje z. La función se transforma mediante la siguiente relación.
 El uso de
El uso de 20 de Enero del 2017
Clase 21
EJEMPLOS DE APLICACIÓN:
EJEMPLO 01
Si  y
y  encuentre la imagen de el cuadrado
encuentre la imagen de el cuadrado %7C0%5Cleq+u+%5Cleq1+%5C:,++0%5Cleq+v+%5Cleq1+%5C%7D)

La transformación dibuja una imagen de la superficie S utilizando sus límites.El primer lado ,S1, es cuando v=0. Utilizando las ecuaciones obtenemos que x=u², y=0, obteniendo que 0≤x≤1. Con estro trazamos en el plano xy a S1como el segmento de recta que va de (0,0) a (0,1).
El segundo lado, S2, es cuando hacemos u=1, sustituyendo en las ecuaciones obtenemos:
- x=1-v2y=2v
Si despejamos para obtener una curva conocida en el plano xy obtenemos que es la parábola  que va de (0,1) a (0,2).
que va de (0,1) a (0,2).
Continuando con S3(v=1) obtenemos que la representación en el playo xy corresponde a la parábola que va de (0,2) a (-1,0).
que va de (0,2) a (-1,0).
Por último al desarrollar la transformación para S4encontramos que es el segmento de recta que va desde (-1,0) hacia (0,0).
Al identificar la superficie S nos movemos en sentido antihorario, por lo tanto al graficar en el plano xy nos moveremos en el mismo sentido, obteniendo una gráfica delimitada por dos parábolas y el eje x.

EJEMPLO 02
Primero encontramos el Jacobiano:
%7D%7B%5Cpartial+(u,v)%7D%3D%5Cbegin%7Bvmatrix%7D%5Cfrac%7B%5Cpartial+x%7D%7B%5Cpartial+u%7D+%26+%5Cfrac%7B%5Cpartial+x%7D%7B%5Cpartial+v%7D+%5C%5C+%5Cfrac%7B%5Cpartial+y%7D%7B%5Cpartial+u%7D+%26+%5Cfrac%7B%5Cpartial+y%7D%7B%5Cpartial+v%7D%5Cend%7Bvmatrix%7D%3D%5Cbegin%7Bvmatrix%7D2u+%26+-2v%5C%5C+2v+%26+2u%5Cend%7Bvmatrix%7D%3D4u%5E2%2B4v%5E2+%3E+0)
%7D%7B%5Cpartial(u,v)%7D%5Cright%7CdA%3D%5Cint_%7B0%7D%5E%7B1%7D%5Cint_%7B0%7D%5E%7B1%7D(2uv)4(u%5E2%2Bv%5E2)dudv%3D)
![8\int_{0}^{1}\int_{0}^{1}(u^3v+uv^3)dudv=8\int_{0}^{1}\left [\frac{1}{4}u^4v+\frac{1}{2}u^2v^3\right ]_{u=0}^{u=1}dv=](https://www.wikimatematica.org/mimetex.cgi?8%5Cint_%7B0%7D%5E%7B1%7D%5Cint_%7B0%7D%5E%7B1%7D(u%5E3v%2Buv%5E3)dudv%3D8%5Cint_%7B0%7D%5E%7B1%7D%5Cleft+%5B%5Cfrac%7B1%7D%7B4%7Du%5E4v%2B%5Cfrac%7B1%7D%7B2%7Du%5E2v%5E3%5Cright+%5D_%7Bu%3D0%7D%5E%7Bu%3D1%7Ddv%3D)
![\int_{0}^{1}(2v+4v^3)dv=\left [ v^2+v^4 \right ]_{0}^{1}=2](https://www.wikimatematica.org/mimetex.cgi?%5Cint_%7B0%7D%5E%7B1%7D(2v%2B4v%5E3)dv%3D%5Cleft+%5B+v%5E2%2Bv%5E4+%5Cright+%5D_%7B0%7D%5E%7B1%7D%3D2)
%7D%7B%5Cpartial+(u,v)%7D%3D%5Cbegin%7Bvmatrix%7D+%5Cfrac%7B%5Cpartial+x%7D%7B%5Cpartial+u%7D+%26+%5Cfrac%7B%5Cpartial+x%7D%7B%5Cpartial+v%7D+%5C%5C+%5Cfrac%7B%5Cpartial+y%7D%7B%5Cpartial+u%7D+%26+%5Cfrac%7B%5Cpartial+y%7D%7B%5Cpartial+v%7D%5Cend%7Bvmatrix%7D%3D)


%7D%7B%5Cpartial+(u,v,w)%7D%3D%5Cbegin%7Bvmatrix%7Dsin%5Cphi+cos%5Ctheta+%26+-%5Crho+sin%5Cphi+sin%5Ctheta+%26+%5Crho+cos%5Cphi+cos%5Ctheta%5C%5C+sin%5Cphi+sin%5Ctheta+%26+%5Crho+sin%5Cphi+cos%5Ctheta+%26+%5Crho+cos%5Cphi+sin%5Ctheta%5C%5C+cos%5Cphi+%26+0+%26+-%5Crho+sin%5Cphi%5Cend%7Bvmatrix%7D)
-%5Crho+sin%5Cphi(%5Crho+sin%5E2%5Cphi+sin%5E2%5Ctheta%2B%5Crho+sin%5E2%5Cphi+cos%5E2%5Ctheta)%3D)

dV%3D%5Ciiint_S+f(%5Crho+sin%5Cphi+cos%5Ctheta,%5Crho+sin%5Cphi+sin%5Ctheta,+%5Crho+cos%5Cphi)%5Crho%5E2+sin%5Cphi+d%5Crho+d%5Ctheta+d%5Cphi)
Utilice el cambio de variables ,  para evaluar el integral doble
para evaluar el integral doble  , donde R es la region acotada por el eje x y las parábolas
, donde R es la region acotada por el eje x y las parábolas  y
y  tomando en cuenta que
tomando en cuenta que  .
.
Este ejemplo se había hecho anteriormente, pero se desea emplear el teorema aprendido. Ya se encontraron los límites de integración, pero la razón de hacer un cambio de variables es que resulta más fácil evaluar el integral sobre la región S que sobre la región R.
-
 lo transformamos en
lo transformamos en
Primero encontramos el Jacobiano:
Luego utilizando el teorema aprendido
EJEMPLO 03
Evalúe el integral  , donde R es la región trapezoidal con vértices en (1,0), (2,0), (0,-2) y (0,-1).
, donde R es la región trapezoidal con vértices en (1,0), (2,0), (0,-2) y (0,-1).
Como no es tan simple integrar la función dada se sugiera hacer un cambio de variables para facilitar el integral. Entonces haremos u=x+y y v=x-y.
Esto nos da una transformada del plano xy al plano uv, pero necesitamos despejar para x y para y. Si resolvemos el sistema de ecuaciones obtenemos lo siguiente: ) y
y ) .
.
Se ilustra en la siguiente imagen la transformación que se está realizando

A continuación procedemos a encontrar el Jacobiano para poder encontrar la transformada
24 de Enero del 2017
Clase 22
EJEMPLO 04
Evalúe la integral %7D) , donde D es la región encerrada por;
, donde D es la región encerrada por;  ,
,  ,
,  ,
,  , hacemos el cambio de variables que seria el siguiente:
, hacemos el cambio de variables que seria el siguiente:  ,
,  , después encontramos los puntos de intersección y serian los siguientes:
, después encontramos los puntos de intersección y serian los siguientes:,+(2/3,2/3),+(4/3,1/3),+(2/3,/-1/3)) , si evaluamos los puntos (x,y) anteriores en nuestras ecuaciones de cambio de variables para poder graficar serian los siguientes:
, si evaluamos los puntos (x,y) anteriores en nuestras ecuaciones de cambio de variables para poder graficar serian los siguientes: ,(2,0),(2,1),(0,1)) , tenemos que encontrar ecuaciones
, tenemos que encontrar ecuaciones  y
y  en funcion de
en funcion de  y
y  , nuestras ecuaciones despejadas serian:
, nuestras ecuaciones despejadas serian:  ,
, .
.
Encontramos el jacobiano:

Encontramos el jacobiano:
EJEMPLO 05
Encuentre la transformada para integrales triples en coordenadas esféricas
En este caso el cambio de variables está dado por las ecuaciones ,
,  y
y 
Si computamos el Jacobiano obtenemos lo siguiente
Si hacemos variar  entonces sabemos que
entonces sabemos que  , por lo que podemos decir
, por lo que podemos decir %7D%7B%5Cpartial+(u,v,w)%7D+%5Cright+%7C%3D%5Cleft+%7C+-%5Crho%5E2+sin%5Cphi+%5Cright+%7C%3D%5Crho%5E2+sin%5Cphi)
Para hacer el cambio de variables entonces utilizaremos lo siguiente
Aplicaciones:
Sirven para representar fenómenos naturales tales como:
-Rapidez y dirección del viento
-Magnitud del campo gravitacional en diferentes lugares sobre la superficie terrestre
-Flujo del viento alrededor de alerones de aviones
-Flujo de corrientes marinas

Un campo vectorial se define como una función que se define sobre un vector en Rn, es decir, un vector que se transforma en otro vector gracias a una función f:

Considerando un plano:
Sea D un conjunto en R2, una región plana. Un campo vectorial sobre R2 es una función F que asigna a cada punto (x,y) en D un vector bidimensional F(x,y).
Considerando un espacio:
Sea E un subconjunto de R3. Un campo vectorial sobre R3 es una función F que asigna a cada punto (x,y,z) en D un vector bidimensional F(x,y,z).
Se dice que un campo vectorial  es conservativo si la circulacion del campo a lo largo de una curva es independiente del camino, solo depende de los puntos inicial y final de la circulación.
es conservativo si la circulacion del campo a lo largo de una curva es independiente del camino, solo depende de los puntos inicial y final de la circulación.
Los campos conservativos se pueden expresar como gradiente de una función escalar, es decir existe una función escalar de punto V(x,y,z) que cumple:
 por lo que el cálculo de la circulación se convierte en:
por lo que el cálculo de la circulación se convierte en:
 La circulación de un campo conservativo por una línea cerrada es por tanto cero:
La circulación de un campo conservativo por una línea cerrada es por tanto cero:
 Si un campo vectorial es conservativo cumple además estas condiciones:
Si un campo vectorial es conservativo cumple además estas condiciones:
 ;
;  ;
; 

 (3)
(3)
 (4)
(4)
 (5)
(5)
- Cálculo de áreas planas.
- Cálculo de volúmenes.
- Cálculo del centro de masa.
- Cálculo de momentos de inercia.
- Cálculo de probabilidades.
Centros de Masa
El centro de masa es el punto donde se considera está concentrada la masa de un cuerpo.
 Caso Discreto
Caso Discreto
 Caso Continuo
Caso Continuo

Distribuciones de masa

Distribución de masa volumétrica:
este caso nos da el máximo incremento de la masa en relación al volumen

Momentos de Inercia
El centro de masa es el punto donde se considera está concentrada la masa de un cuerpo.



Distribución de masa lineal:
este caso nos da el incremento maximo de la lmasa con respecto a longitud

Distribución de masa superficial:
Distribución de masa superficial:
este caso nos da el máximo incremento de la masa en relación al área de una región
Distribución de masa volumétrica:
este caso nos da el máximo incremento de la masa en relación al volumen

Campos Vectoriales
Sirven para representar fenómenos naturales tales como:
-Rapidez y dirección del viento
-Magnitud del campo gravitacional en diferentes lugares sobre la superficie terrestre
-Flujo del viento alrededor de alerones de aviones
-Flujo de corrientes marinas
Un campo vectorial se define como una función que se define sobre un vector en Rn, es decir, un vector que se transforma en otro vector gracias a una función f:
Considerando un plano:
Sea D un conjunto en R2, una región plana. Un campo vectorial sobre R2 es una función F que asigna a cada punto (x,y) en D un vector bidimensional F(x,y).
Considerando un espacio:
Sea E un subconjunto de R3. Un campo vectorial sobre R3 es una función F que asigna a cada punto (x,y,z) en D un vector bidimensional F(x,y,z).
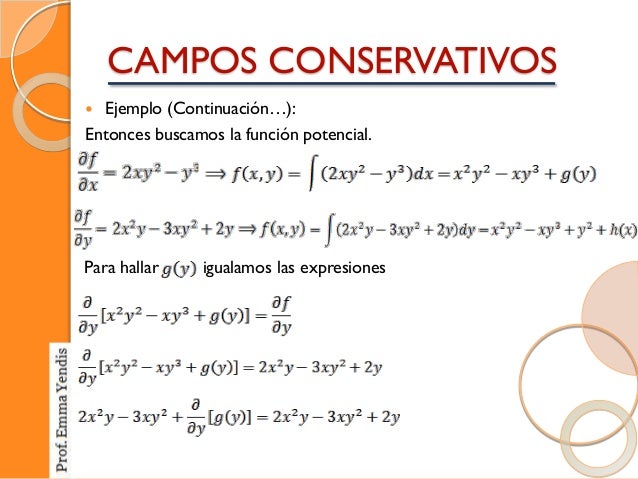
CAMPOS CONCERVATIVOS
Los campos conservativos se pueden expresar como gradiente de una función escalar, es decir existe una función escalar de punto V(x,y,z) que cumple:
Los campos de gradientes son conservativos por definición, y la función de la cual derivan es una función potencial (notar que ésta queda definida a menos de una constante, o sea que en realidad se tiene una familia de funciones potenciales).
para identificar de forma sensilla si un campo es o no concervartivo recurrimos al calculo del rotacional de la funcion el cual debe dar cero
ROTACIONAL Y DIVERGENTE DE UN CAMPO ESCALAR
Divergencia:
La divergencia de un campo vectorial mide la diferencia entre el flujo entrante y el flujo saliente en una superficie que encierra un elemento de volumen dV . Si el volumen elegido solamente contiene fuentes o sumideros de un campo, entonces su divergencia es siempre distinta de cero.
La divergencia de un campo vectorial en un punto es un campo escalar, que se define como el flujo del campo vectorial por unidad de volumen conforme el volumen alrededor del punto tiende a cero, para el caso del campo magnético la divergencia viene dada por la ecuación
(3)
donde S es una superficie cerrada que se reduce a un punto en el límite, B es el campo magnético, V es el volumen que encierra dicha superficie S y  es el operador nabla, que se clacula de la sigueinte forma:
es el operador nabla, que se clacula de la sigueinte forma:
(4)
La divergencia de un campo es un valor escalar con signo. Si este signo es positivo, quiere decir que el campo emana hacia el exterior de dicho punto y, por tanto, es una fuente o manantial. Si el signo es negativo, el campo converge hacia un punto del interior del volumen, por lo que constituiría un sumidero. Si la divergencia fuese cero el campo neto (diferencia entre las líneas entrantes y salientes) sería nulo.
En el caso de los campos magnéticos se ha comprobado la ausencia de fuentes y/o sumideros de ahí que una de sus propiedades sea que su divergencia es nula (ecuación 5).
Los campos cuya divergencia es cero se denominan campos solenoidales, que se caracterizan porque sus líneas de campo son cerradas sobre si mismas, es decir, no tienen extremos donde nacen o mueren. De tener dichos extremos, el flujo neto alrededor de uno de ellos no sería nulo, lo cual denotaría la existencia de una fuente o sumidero del campo.
No hay comentarios.:
Publicar un comentario